Los
3 siguientes modelos fueron experimentaciones con modelos modificados
de los famosos pilotos soviéticos Anatoliy Kolesnikov y Alexandr
Listopad.
|
Click en la
imagen para ampliar
|
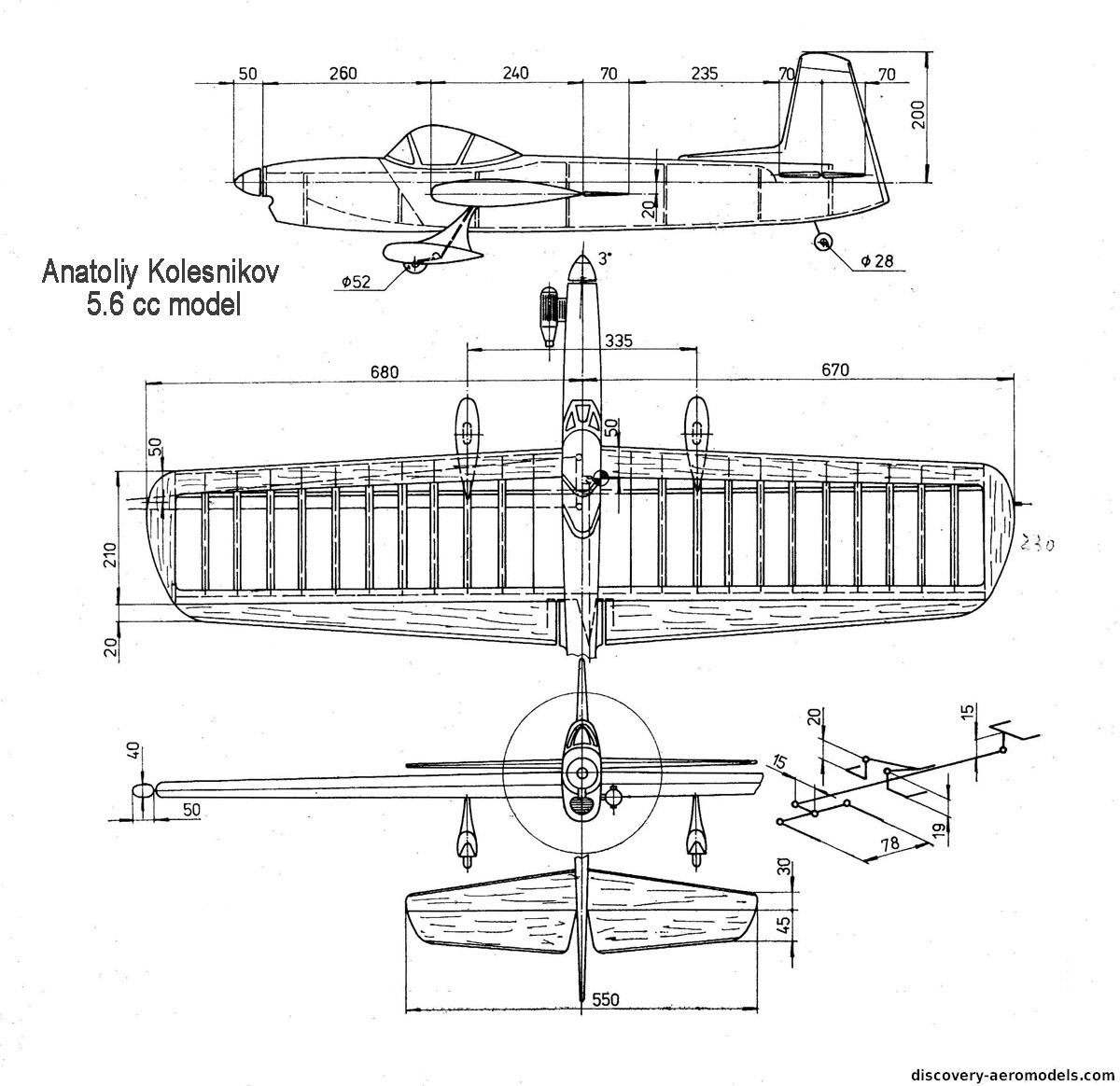
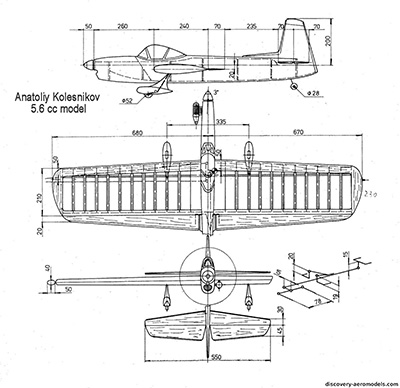
| Anatoliy
Kolesnikov modelo KA-5 con motor de 5.6 cc |

|
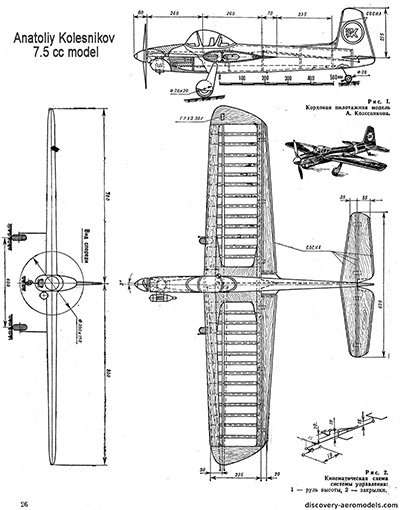 |
| El
modelo más famoso de Anatoliy Kolesnikov KA-8 con motor
de 7.5 cc |
 Anatoliy Kolesnikov modelo
KA-10 con motor 10cc
Anatoliy Kolesnikov modelo
KA-10 con motor 10cc
|
|
Click en la
imagen para ampliar
|
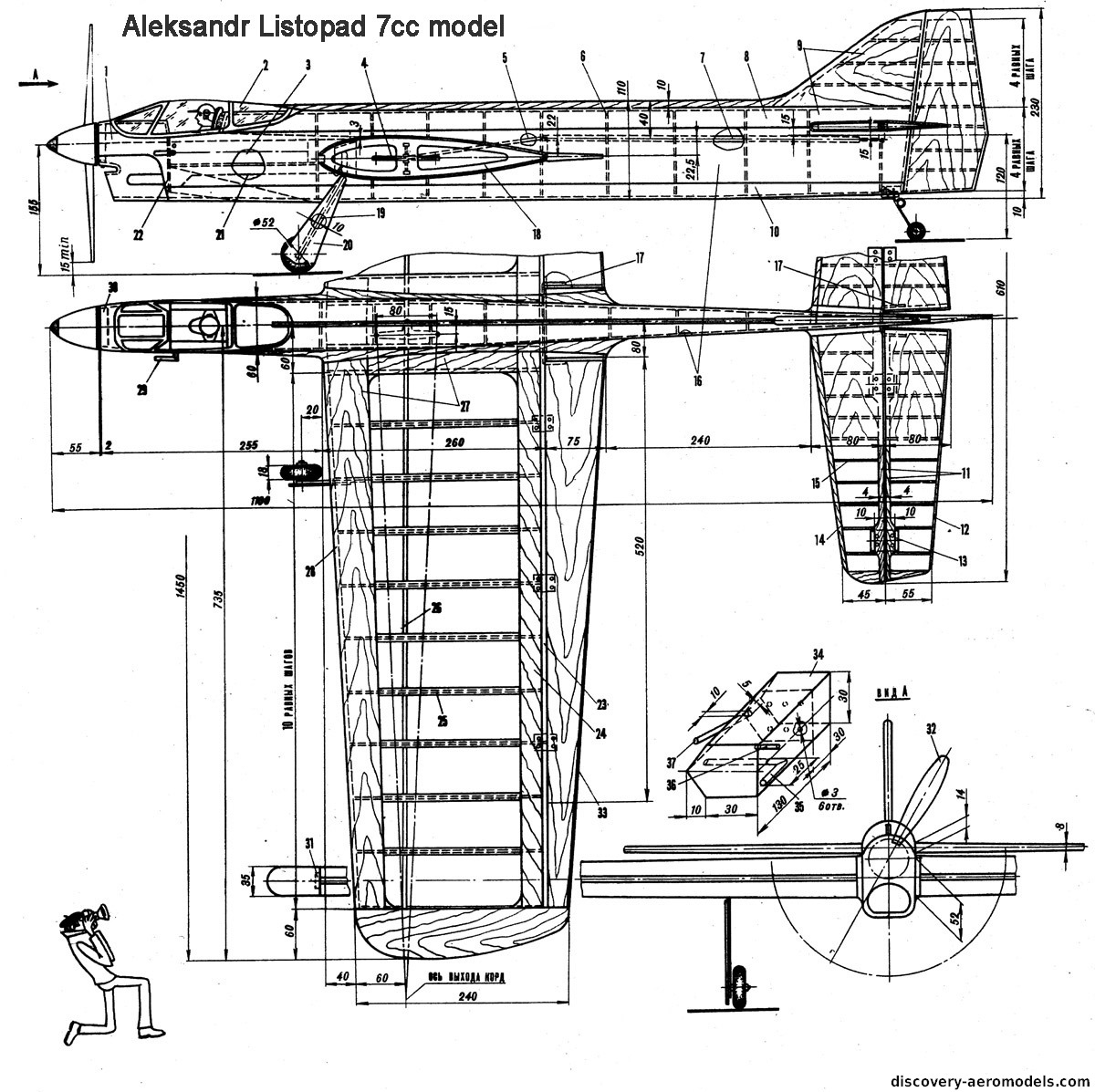
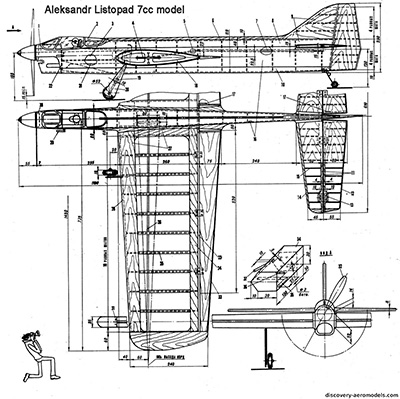
| Aleksandr
Listopad modelo 7cc |
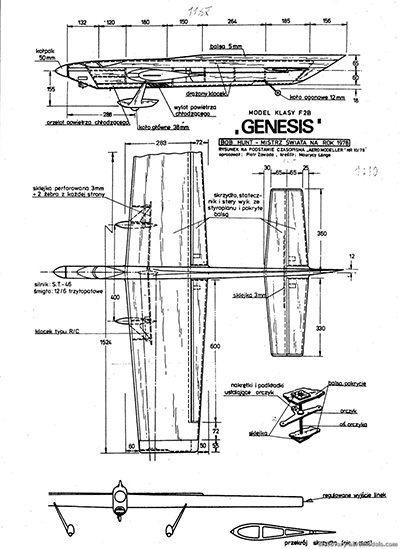
Luego
en los 80 fue el momento de construir algunos modelos basados en
publicaciones americanas, como los famosos American Stiletto, Exitation,
Genesis y Eclipse, que brindaron la información para los
primeros diseños experimentales, constituyéndose en
la base para el próximo modelo de creación personal.
Ya en la época de mis primeros modelos, en la cual utilizaba
perfiles sacados de catálogos de aerodinámica, comencé
a entender que ese tipo de perfiles no eran buenos para modelos
acrobáticos VC. Eran muy sensibles a la turbulencia y consumían
demasiada energía de parte del motor, con lo cual se perdía
velocidad en giros marcados.
Di con un perfil eficiente en una charla que mantuve con Anatoliy
Kolesnikov, en la que le pregunté por qué el perfil
de su último modelo (el KA-8 en ese momento) tenía
un radio de borde de ataque visiblemente más pequeño.
Su respuesta fue que en modelos anteriores utilizaba radios mayores,
pero los modelos no eran lo suficientemente precisos en el aire,
y se le dificultaba también el planeo al momento del aterrizaje.
Con el borde de ataque de menor radio estas habilidades mejoraron.
Por otro lado comentaba que a su criterio, mantener en una misma
línea motor-ala- estabilizador crea la sensación de
un modelo más simétrico y de mejor control, y que
realmente él tenía la sensación que con ese
modelo no necesitaba entrenar menos para obtener buenos resultados,
en comparación a su anterior modelo donde no tenía
esta alineación.
Viendo cuán parejos eran en vuelo los modelos de Anatoliy,
intenté crear un perfil nuevo basado en mi experiencia y
esta charla con el propio Anatoliy, y resultó ser muy exitoso.
Los modelos con este perfil comenzaron a volar mucho mejor en condiciones
de viento, siendo también más ágiles en los
giros y con mejor estabilidad general. El primer perfil fue generado
con espesor de 56mm, luego llevado a 64 mm para mejorar aún
más la estabilidad en aire turbulento.
Sobre
los modelos todo-en-una-línea (motor-ala-estabilizador).
Desde ese momento comencé a construir solo modelos de ese
tipo, y confirmé que estaba en lo correcto cuando tuve la
oportunidad de volar un modelo de Luchiano Compostella equipado
con un Webra 4T. Tradicionalmente los modelos de Luchiano tienen
el ala en una ubicación muy baja respecto del estabilizador,
este modelo era el actual campeón europeo, resultaba muy
interesante para mi ver como volaba.
|
|
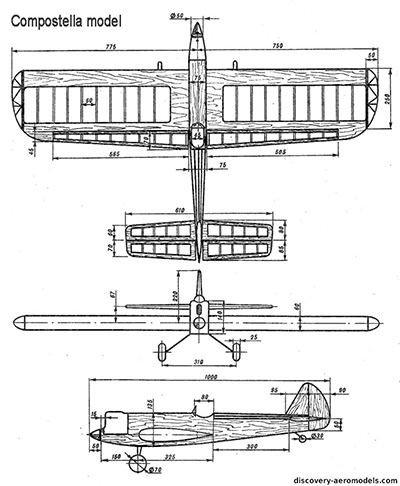
| Modelo
Luchiano Compostella con motor de 4 tiempos Webra T4-60 (10
cc) |
Me
impresionó mucho la estabilidad horizontal del modelo tanto
en vuelo normal como invertido, esquinas bien marcadas, todas y
cada una de las veces. Lo único que no me convenció
fue la estabilización del modelo en las salidas de las esquinas
de maniobras cuadradas, siempre intentaba dibujar una onda al salir,
y por más que me esforcé en corregirlo, fue infructuoso.
Mis más sinceros respetos a Luchiano, enorme piloto, quien
logró el Europeo con este modelo y seguramente necesitó
de gran entrenamiento para poder alcanzarlo.
Luego de esa prueba entendí que había diferencia entre
los modelos todo-en-una-línea y los esquemas tradicionales
más antiguos, con figuras invertidas muy correctas pero problemas
en las figuras normales. Mi explicación a esto es que en
los modelos "todo en línea" a ángulos de
ataque grandes, el ala se acerca más al estabilizador. En
el caso del modelo de Luchiano, por ejemplo, dada la mayor distancia,
esta sensación de inestabilidad se hacía más
evidente.
Por esta misma razón me gusta probar diferentes modelos,
cada uno de esos vuelos de prueba concentra la experiencia y los
gustos de la persona que construyó el modelo. A mi criterio,
distancias menores entre ala y estabilizador no son tan visibles
en la sensación que se traslada a la manija, no siendo bueno
utilizar distancias demasiado grandes.
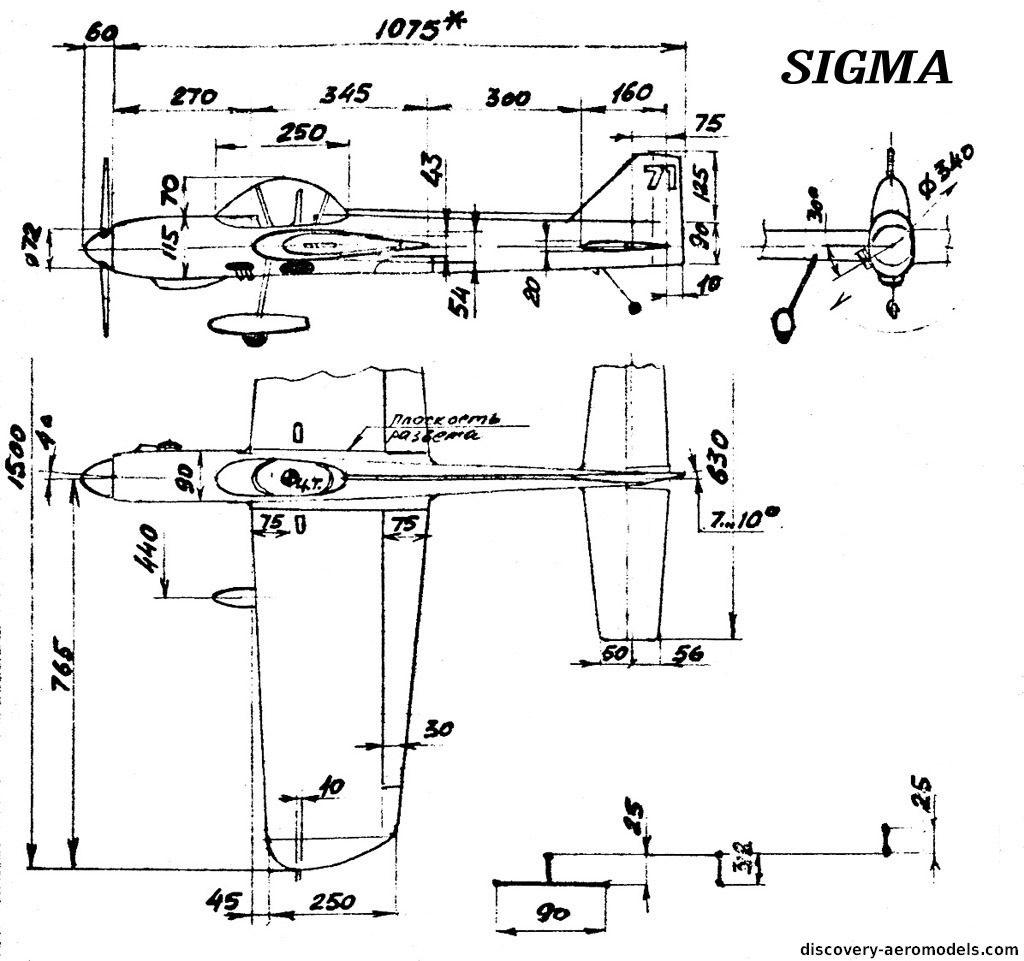
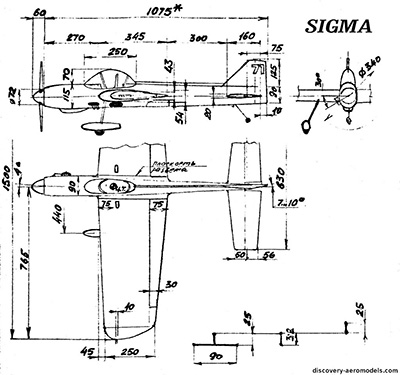
El prototipo del Classic fue el modelo Sigma, que usé en
el Mundial de 1992, y el que por primera vez incluía un motor
Discovery Retro.

|
Click en la
imagen para ampliar
|
| "Sigma",
mi primer modelo de diseño clásico desmontable
en línea con el primer motor "Discovery Retro"
de 9 cc. |
Al
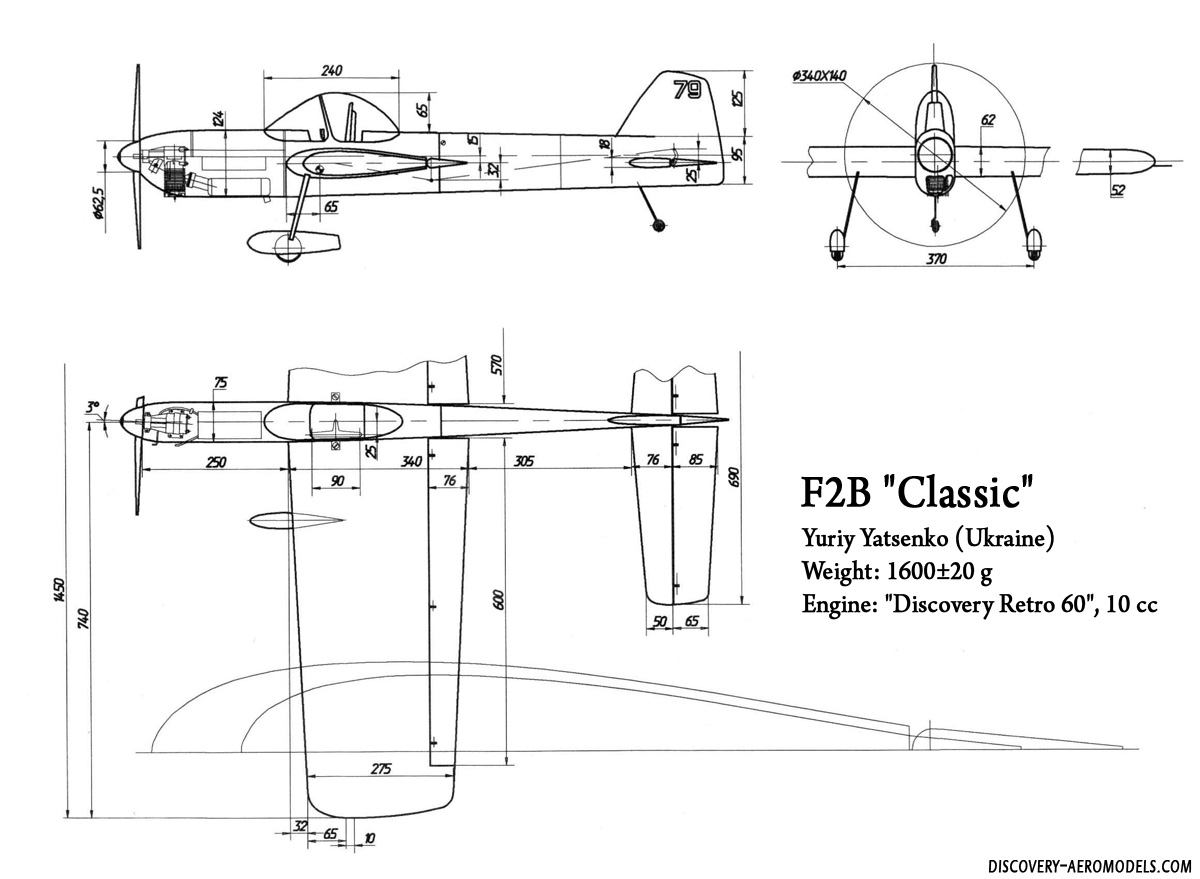
año siguiente nació el primer Classic puro. El modelo
tuvo tanto éxito que sigue en uso hasta hoy, sin modificaciones
de importancia, con gran estabilidad en vuelo horizontal, capacidad
de trazar esquinas bien marcadas y gran facilidad de nivelación.
El resultado fue tan bueno gracias a que pude encontrar el balance
ideal entre la posición del ala y el estabilizador, como
así también el tamaño de las distintas superficies
de control. Fue también muy importante lograr un momento
bajo respecto del eje transversal del ala, es decir, una trompa
y una cola muy livianas.
Lo que voy a tratar de hacer ahora, es resumir la fórmula
de un modelo acrobático exitoso, surgida luego de construir
y volar gran cantidad de modelos:
1) Angulo cero entre motor, ala y estabilizador.
2) Perfil simétrico tanto en ala como estabilizador (incluyendo
las de control, montajes, etc).
3) El mínimo momento posible en relación al eje transversal
del ala.
4) Sistema de control lo más suave y liviano posible.
5) Balance entre la superficie de ala y estabilizador, como así
también su distancia, y tanto el área como los ángulos
de rotación de flaps y elevador.
Si
se pasa por alto cualquiera de estos puntos, el modelo perderá
sus características de vuelo. Si va a construir un modelo
en base a planos de cualquier modelo famoso, tiene que recordar
que debe seguir al pie de la letra todas las indicaciones, y el
modelo va a volar tal cual se espera o incluso mejor que el prototipo.
Pero si no pone atención a las reglas, se va a sorprender
de lo mal que puede funcionar, y en este caso problemente le dará
la culpa a que el prototipo original no era tan bueno como se decía,
pero la realidad será que usted no sabe o no pone la suficiente
atención a las reglas generales que se deben seguir en la
construcción de un modelo acrobático VC.
Detallemos
ahora, paso por paso, como construir el modelo en base a las reglas
descriptas:
1) Instalar todas las superficies y el motor en cero total a lo
largo del fuselaje. Debe ubicar una base y asegurarse que esté
perfectamente recta, hecho esto podrá fácilmente alinear
todas las partes con esa base sin necesidad de accesorios complicados.
Si la base no es bien controlada y tiene deformaciones, lógicamente
esos errores se trasladarán al modelo.
2) Perfil absolutamente simétrico, cómo lograrlo?.
Es importante poner atención desde el paso 1, es decir, la
generación de las plantillas, corte de costillas, etc, y
también al momento de pegar y recubrir, para que no quede
diferencia alguna entre la parte superior y la inferior. Es vital
marcar e instalar los flaps / elevador exactamente en la línea
media del perfil, caso contrario el perfil no será simétrico
y el modelo no se comportará con la lógica esperada.
3) Momento mínimo a lo largo del eje del ala, significa que
tanto la trompa como la cola deben ser lo más livianas posible.
Es aconsejable comenzar a construir desde el estabilizador, de esta
forma, si el estabilizador sale demasiado pesado, lo más
conveniente es descartarlo directamente y comenzar con otro hasta
que se logren los valores deseados. De acuerdo al peso del estabilizador
y el motor, se debe ajustar ligeramente la longitud de la trompa,
es muy importante hacer esto de forma correcta, porque sino el CG
no quedará en la posición buscada y deberemos recurrir
a peso extra para corregirlo, lo cual obviamente es malo por 2 razones:
primero que es peso muerto, y segundo que aumenta el momento a lo
largo del eje del ala, sea del lado de la trompa o del estabilizador.
Obviamente
es mejor elegir un motor liviano que uno pesado, aunque lógicamente
esto tendrá que adaptarse a las características de
lo que se disponga. Si el motor es muy pesado, se aumentará
el peso general del modelo y se deberá utilizar una nariz
demasiado corta, ambas cosas no son buenas para su desempeño.
Una nariz muy corta rompe el balance entre la nariz y el área
trasera del fuse, lo cual aumenta la tendencia del modelo a meter
la nariz en contra viento, algunas veces es peligroso también
para la tensión de líneas.
En
el caso del Classic, para obtener un momento mínimo nariz-estabilizador
y ahorrar peso, recurrimos al moldeo de las partes, esto permite
una muy buena terminación superficial con menor peso.
La
forma tradicional de recubrimiento, entelando la madera con papel
y luego pintando en sucesivas capas, permite un muy buen acabado
pero suma mucho peso. También se puede recubrir con alternativas
como Oracover, Monokote, etc, con ahorro de peso pero no buena terminación,
especialmente detalles en uniones y empalmes. Al disponer de moldes,
la ventaja es que se puede pintar sobre los mismos y que esta capa
se adhiera luego de forma directa al material de la superficie del
ala, dando buena terminación con menos peso. Además
de la ventaja lógica del molde, que permite piezas repetibles,
muy estables geométricamente.
Unos
comentarios más sobre momentos, específicamente el
momento giroscópico de la hélice. Lo ideal sería
que la hélice no tuviese peso… bueno, por eso tratamos de
hacerla lo más liviana posible. He probado muchos tipos de
hélices y en la mayoría de los casos los mejores resultados
se obtienen con hélices de madera. Si la hélice es
muy pesada, como algunas plásticas, aumenta la tendencia
del modelo a torsionar la trayectoria, especialmente en giros marcados.
Más pesada la hélice, más rpm, más torsión.
Para entender esta fuerza actuante sobre el modelo, puede probarlo
en una rueda de bicicleta, tomarla desde los extremos de la maza,
hacerla girar e intentar cambiar mientras gira la orientación
de la maza. Más pesada la llanta y más rápido
gire, más se resistirá el eje a moverse, se sorprenderá.
4) Movimiento suave y liviano del sistema de control. Es mejor usar
pares metal - plástico para la fricción en las uniones,
no es necesario lubricar ya que en este caso el coeficiente de fricción
es muy bajo, esta solución también presenta mayor
vida útil y menor peso. Es preferible que haya mínimos
juegos en el sistema de movimientos, que un sistema frenado. Recordar
que nuestro modelo es acrobático, los sistemas de movimiento
deben ser absolutamente perfectos. Si volamos con un sistema de
control duro o incómodo, es como manejar un auto con el volante
o las ruedas trabadas. Un sistema duro también aumenta las
chances de golpear innecesariamente al modelo.
Cuando
el modelo está en tierra y mueve la manija, debe poder hacerlo
sin sentir fricción alguna. El peso del sistema de control
también es muy importante, en especial en la zona trasera,
ya que un pushrod pesado en movimiento rápido, reduce la
velocidad de reacción del sistema, y no se siente bien cuando
el modelo tarda en reaccionar a las órdenes de la manija.
Lo mismo corre para los flaps y los elevadores, menos peso = menos
inercia = más rápida respuesta.
5) Siente necesidad de crear un modelo nuevo de su propio diseño.
Es muy común que diseñadores con no gran experiencia,
tomen los planos de un modelo reconocido y traten de modificar algunas
medidas y características.
Ejemplo:
quiere tener un modelo más estable y maniobrable que el original,
entiende que es posible lograrlo aumentando el momento del estabilizador,
es decir alejándolo, por lo tanto ajusta esta medida y construye
el modelo. Aún si respeta a rajatabla el resto de las especificaciones,
es muy posible que el modelo no se comporte como lo esperado, porque
no tuvo en cuenta el balance general. En pocas palabras, todo buen
modelo está balanceado, si atrasa el estabilizador, no solo
cambia su momento aerodinámico sino también la ubicación
de su masa, es decir, atrasa el CG. Sí, el modelo va a ser
más maniobrable, pero perderá estabilidad, será
más reactivo en el vuelo horizontal.
Se
pierde por completo el balance del modelo: qué hacer cuando
pasa esto?. Supongamos que mueve el CG hacia adelante, pone más
peso en la nariz, pero aún así el modelo no vuela
más estable, se sacude al salir de las esquinas marcadas,
qué sucede?, bien, el balance sigue siendo incorrecto. El
momento de nariz y trompa del modelo sobre el eje del ala, aumentaron,
ya que agregó peso en la trompa y atrasó el estabilizador
(es decir, aumentó el momento de cola), además el
peso general del modelo es mayor por el extra en la trompa.
Supongamos
ahora que es un diseñador con más experiencia y entiende
la importancia de mantener el CG en el lugar correcto; decide volver
el estabilizador a su posición original y aumentar la medida
de la trompa, sería inicialmente una decisión lógica,
sin embargo es probable que tampoco tenga en este caso los resultados
esperados, por qué?, simplemente porque el problema del mayor
valor de momento sobre el eje del ala se mantiene, solo corrigió
el exceso en el peso total.
Todo
esto lo lleva a entender finalmente, que si decide atrasar la posición
del estabilizador y desea mantener el balance, debe mantener la
ubicación del CG, por lo tanto necesita no solo atrasar el
estabilizador sino hacerlo más liviano. Cuánto más
liviano dependerá lógicamente de la distancia que
lo atrase.
Bueno,
eso es todo?, claro que no, nos estamos olvidando del balance entre
flaps y elevador. Los momentos de flaps y elevador actúan
en varias direcciones. Al atrasar el estabilizador, se rompió
el balance de estos momentos, ahora el momento del elevador es mayor,
en otras palabras, está aumentando el efecto del estabilizador
sobre el control del modelo, más de lo que piensa. Nuevamente
deberá intentar retomar el balance, y para ello tendrá
que aumentar el área de los flaps y/o reducir la del elevador.
Bien,
hemos aumentado por ejemplo el área de los flaps, pero posiblemente
haga falta utilizar un motor más potente para no perder velocidad
en las esquinas marcadas. Cambiamos entonces el motor por uno más
potente, el cual, casi con total seguridad, será también
más pesado…y volvemos a repetir el ciclo, desbalanceando
los momentos de trompa y estabilizador, agregando más peso
total al modelo, un modelo con más peso va a necesitar más
superficie general, y así podemos continuar indefinidamente…
Puse
este ejemplo para mostrar que no es tan sencillo lograr un buen
modelo, aún partiendo de un buen diseño conocido.
Todas las reglas expuestas son muy importantes para lograr un modelo
competitivo. Por supuesto, para simplificarlo mostré solo
las características más visibles, hay muchos pequeños
detalles extra que inciden en el comportamiento del modelo que usted
debe conocer, y su interrelación es muy compleja, eso hace
que diseñar un buen modelo no sea fácil, sobre todo
sin conocimiento ni experiencia.
Si
se siente con el talento y las ganas suficientes, leer mucha documentación,
comunicarse con gente de experiencia y probar paso a paso con diferentes
modelos, es lo que le permitirá entender a fondo los conceptos
de vuelo y diseño, sino siempre será mejor construir
el diseño ya probado y competitivo que más le guste,
de la mejor forma que pueda, siguiendo todas las reglas indicadas.
Yuriy
Yatsenko
Traducción: Carlos Perren (Argentina)
Transcripción: Juan C. Pesce (Argentina)