MANUAL
DE ARMADO, PLANOS Y VIDEO
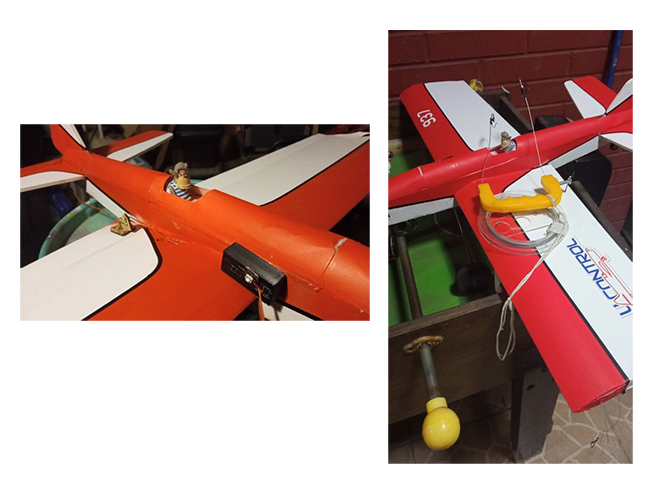
MODELO ENTRENADOR ELECTRICO "9 IMPERIAL"
“9
imperial”
maniobra casi obligatoria para pilotos alumnos y consiste en formar
de manera involuntaria y llamativa la figura de un 9, resultando
de manera habitual en daños parciales en el modelo, pero
vale la pena pues es el ingreso a un selecto grupo de pilotos.
NOTA:
Este modelo fue
desarrollado mirando momentos y formas constructivas de otros
modelos como el promo25 y el Ft simple scout.
La finalidad de diseñar este modelo es promocionar la actividad
de U-control poniendo a disposición de la comunidad un
modelo de muy bajo costo y muy fácil de armar. El tamaño
del modelo lo determinó el motor eléctrico más
económico y común del mercado un 2212 de 1000KV,
el controlador de vuelo fue desarrollado con un sistema Arduino
Nano, también es un sistema económico y sencillo
de construir, pues con el Arduino más un pulsador y una
resistencia se puede hacer. Las líneas de vuelo fueron
hechas con Nylon multifilamento de pesca de 0.18, garantizado
para 17Kg de tracción.
Antes de comenzar con la construcción de este modelo recomiendo
ver el video de armado del FT Simple scout de Flitetest, pues
la forma constructiva de este modelo es similar en el plisado,
sistema de tren de aterrizaje, etc.
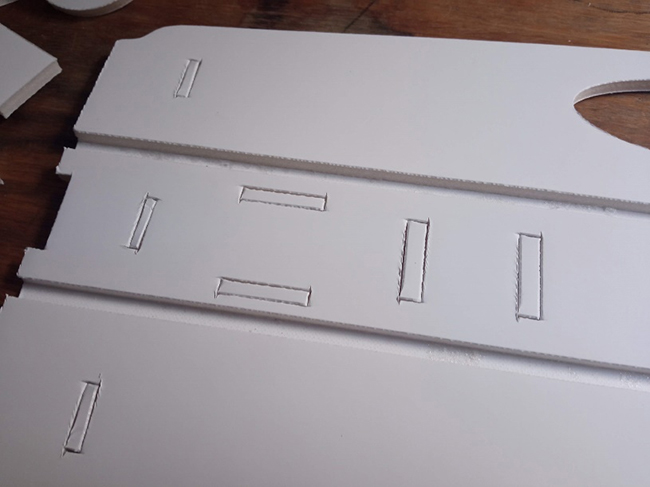
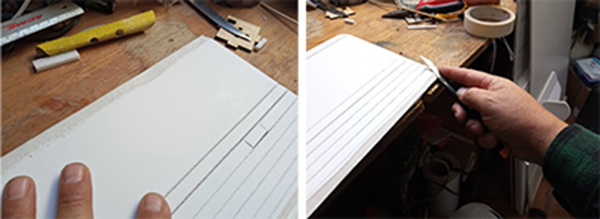
FUSELAJE
Primero “limpiaremos” los surcos de plisado y los surcos del borde
de la parte de abajo o barriga del fuselaje, también tendremos
a mano el para-llamas de terciado y una cuaderna pequeña
que va en el interior del fuselaje sector tren de aterrizaje.
El
plisado de las partes del fuselaje es del tipo “A”, se pone la
parte central del fuselaje contra el mesón y se plisan
los costados hacia arriba apoyando los costados en el mesón
formando un ángulo de 90° como lo indica el siguiente
esquema A-B

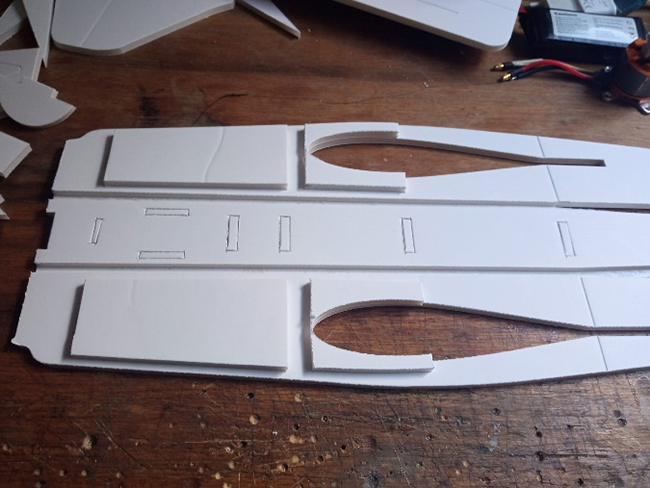
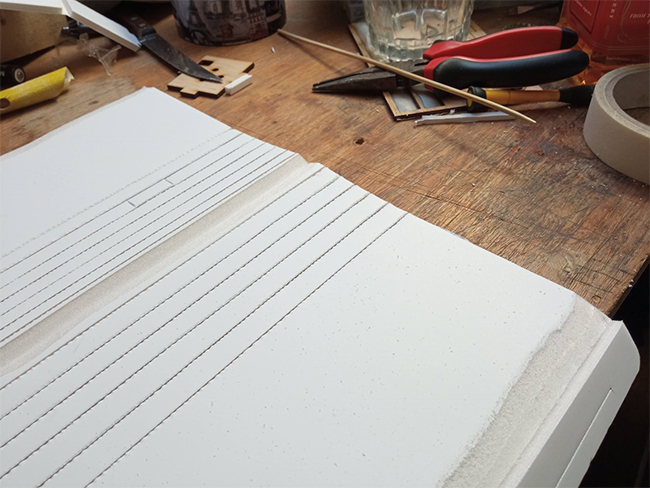
Una vez “limpias”
las partes de presentan los dobles del fuselaje, en este modelo
yo reforcé con cinta adhesiva de filamentos la parte de
debajo de la perforación del perfil en el fuselaje debido
a que es muy débil, luego se pegan los dobles con silicona
caliente u otro pegamento ya testeado por ustedes, es importante
hacer coincidir la línea del corte del perfil del ala y
dejar un espacio de 10mm entre los dos dobles , luego centrar
en altura y dejando un espacio de 5mm del borde superior e inferior.
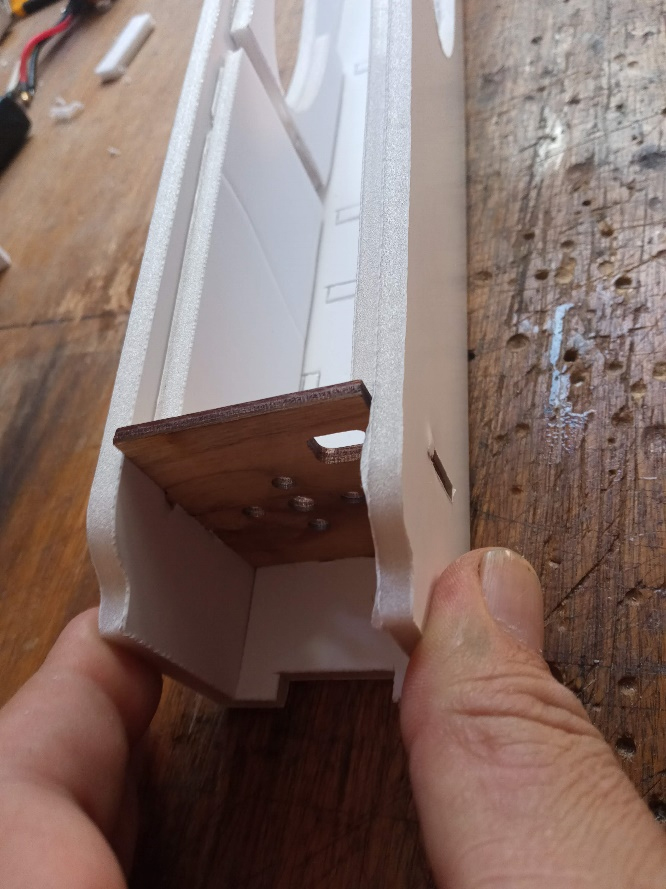
Una
vez pegados los dobles se pega el parallamas a la parte central
del fuselaje, este ya viene con un sistema de encastre dándole
un angulo de 3° de incidencia lateral al motor.
Una vez puesto
el parallamas, de inicia el pegado de los laterales, con silicona
caliente dentro de los surcos y plisar “tipo A” luego se pega
la parte superior del fuselaje con los dos laterales de la cola,
con esto ya tendremos una canal que da la estructura principal
a nuestro fuselaje. Seguido de esto se pega la parte de abajo
del fuselaje.
Se pega la “panza del modelo, esta tiene un borde que se retira
el foam y se deja solo el papel para reforzar este borde dando
una vuelta por el rededor del foam.
Se pega la
cuaderna rectangular en el borde delantero del surco de tren de
aterrizaje formado por los dobles de fuselaje.
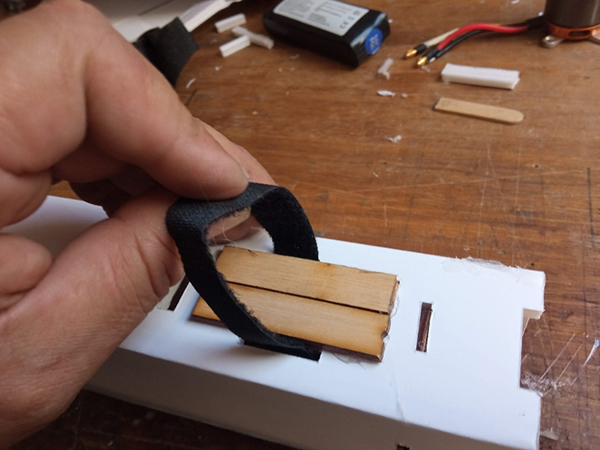
Se pone un
palo de helado cortado en dos o dos palos de helado para soportar
la amarra de la batería.
Se pegan los
formadores en la parte superior del fuselaje y se forran con el
corte de cartulina o papel grueso.
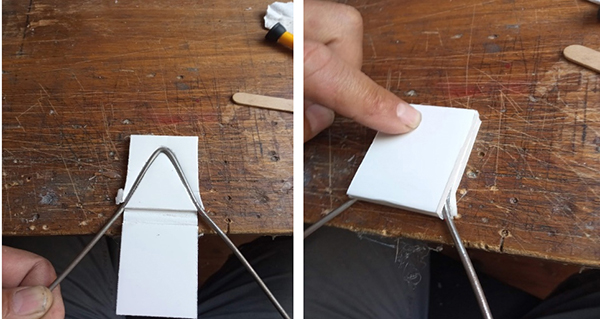
TREN
DE ATERRIZAJE
El tren se arma con un alambre no muy rígido de 3mm de
diámetro doblado en el centro y puesto en una bancada que
se dobla y pega con abundante pegamento formando una cuaderna
que se inserta en el fuselaje en un “riel” creado por el espacio
entre los dobles del fuselaje.
ALA
Primero armamos las vigas internas plisando por el centro y uniendo
sus dos mitades con silicona caliente.
Luego hacemos un corte de 45° en el material del borde de
ataque dentro de ala para permitir el plisado, conviene reforzar
con cinta adhesiva transparente o cinta de filamentos el borde
de ataque por fuera, para llegado el momento de plisar el papel
del cartón pluma no se corte. Luego se deben profundizar
y abrir los medios cortes del ala que permitirán la forma
curva y un corte de entre 25 y 30° para quitar material en
el borde de fuga para que junten bien a la hora de pegar, también
se debe hacer un corte de material en 45° en los flaps de
ala para permitir movilidad.
Se debe pre-armar
la estructura para el bellcrank con dos terciados perforados que
van entre las vigas y la parte interior del ala, una vez verificados
los ajustes se pega todo el conjunto a la parte inferior del ala
haciendo encajar los salientes de las vigas en las muescas en
el ala.
En este punto
las líneas de salida del modelo deben estar fijas al bellcrank.
Una vez pegada la viga central al ala, se procede al cierre, poniendo
pegamento en el interior del borde de ataque y sobre la viga central
aún no en el borde de fuga esto se hace en una etapa posterior,
cuando se esté pegando la parte superior del ala a la viga
se debe procurar la simetría del ala en el sector entre
la viga y el borde de ataque, una vez pegado esto, se pega el
borde de fuga del ala también revisando la simetría
del perfil, haciendo coincidir perfectamente la parte superior
y la inferior de ala, finalmente se ponen las puntas de ala, haciendo
pasar las líneas por las perforaciones en el ala izquierda.
El
pushroad de salida del bellcrank, lo puse posterior al armado
del ala, haciendo un corte rectangular de 3 x 3cm sobre el ala
en el sector preciso pasando la Z por el bellcrank luego tapé
con el mismo material que corté, hice a mano otro corte
para la salida del pushroad
EMPENAJE
El empenaje es sencillo, el estabilizador es doble, el elevador
lleva un corte de material en 45° para formar la bisagra,
la deriva y timón son fijos, el timón va desviado
hacia la derecha 7°, el kit tiene una matriz para este propósito.
HARDWARE
Dos cuernos comerciales de ¾”
El kit tiene unos cuernos de terciado que se pueden utilizar dependiendo
las posibilidades
Pushroads, se pueden hacer de alambre acerado de 1,5mm de diámetro
Tren de aterrizaje, 40cm. de alambre acerado de 2mm o dulce de
3mm dos ruedas de 2”
Líneas de salida, piola de acero de 0,5mm o similar
Motor 2212 de 1.000KV
Hélice 10 x 4,5 o 10 x 3.8 slowflyer o APC 9 x 7
Esc de 20A
Batería de 1300 a 1600 mA de 11.1V (3S)
Líneas de 12,5 mt. de multifilamento 018 de pesca
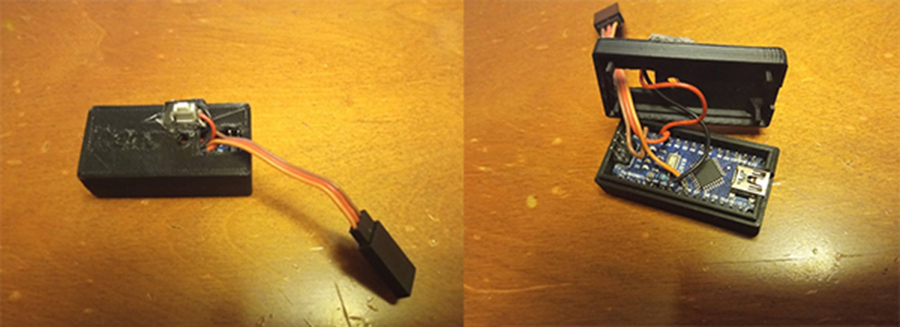
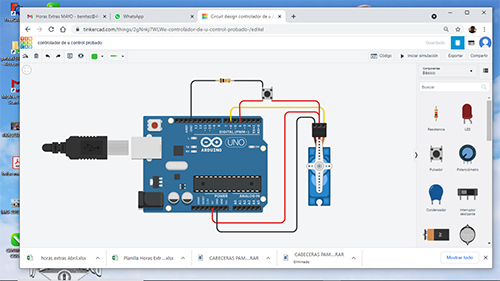
CONTROLADOR
El controlador está hecho con un Arduino Nano programado
a través de la librería servo con un protocolo simple
pero algo rígido, cualquier cambio en los parámetros,
debe hacerse a través de un PC, no he logrado conectar
el Arduino Nano al celular, para a través de arduino móvil
hacer los cambios.
El protocolo
es el siguiente, se conecta la batería y comenzará
el protocolo de bips del ESC, luego de esto el sistema queda armado,
al presionar el botón hará una pausa de 3 segundos
y comenzará una prueba de motor de 2 segundos, luego hará
una pausa de 25 segundos (tiempo para caminar hasta la manilla)
y luego comienza el tiempo de vuelo con un ascenso progresivo
del motor que en un par de segundos llegará a toda la potencia,
lo que evitará problemas con el torque de la hélice,
hará un vuelo de 5 minutos y producirá un rateo
que avisa el fin del vuelo luego de 7 segundos posterior al rateo,
el motor tendrá un descenso paulatino de 5 segundos de
full a cero.
En el ejemplo
aparece Arduino Uno, pero funciona de la misma manera con Nano
La programación del arduino es la siguiente para 5 minutos
de vuelo
El controlador se conecta al ESC, este último alimenta
de 5V al arduino y a través de la señal arduino
envía la info de vuelo a ESC
// C++ code
//
#include <Servo.h>
int pulsador = 0;
Servo servo_6;
void setup()
{
pinMode(4, INPUT);
Serial.begin(9600);
servo_6.attach(6, 500, 2500);
}
void loop()
{
pulsador = digitalRead(4);
Serial.println("pulsador=");
Serial.println(pulsador);
servo_6.write(0);
if (pulsador == 1) {
Serial.println("estado dentro de si");
delay(3000); // Wait for 3000 millisecond(s)
servo_6.write(60);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(90);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(120);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(180);
delay(1000); // Wait for 1000 millisecond(s)
servo_6.write(0);
delay(25000); // Wait for 25000 millisecond(s)
servo_6.write(60);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(90);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(120);
delay(350); // Wait for 350 millisecond(s)
servo_6.write(180);
delay(300000); // Wait for 300000 millisecond(s)
servo_6.write(0);
delay(400); // Wait for 400 millisecond(s)
servo_6.write(180);
delay(7000); // Wait for 7000 millisecond(s)
servo_6.write(150);
delay(2000); // Wait for 2000 millisecond(s)
servo_6.write(120);
delay(1000); // Wait for 1000 millisecond(s)
servo_6.write(90);
delay(1000); // Wait for 1000 millisecond(s)
servo_6.write(60);
delay(1000); // Wait for 1000 millisecond(s)
servo_6.write(30);
delay(1000); // Wait for 1000 millisecond(s)
servo_6.write(0);
}
Serial.println("estado fuera de si");
}
Nota: se pude
variar el tiempo de vuelo cambiando el número en rojo,
estos son los milisegundos de vuelo, ejemplo, para 4 minutos se
escribe 240000.
|
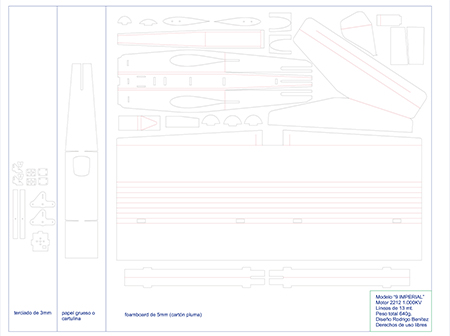
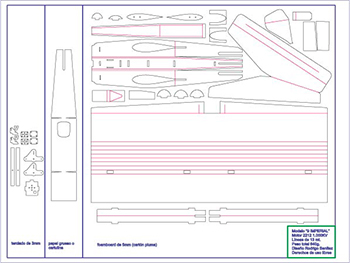
PLANO EN FORMATO .PDF
|
PLANO
EN FORMATO CAD: DXF
 |
VIDEO
 |
Diseño
Rodrigo Benítez M (Bacalao)
Cualquier consulta a través del grupo de “UControl Chile”
en Facebook