Desde hace dos años Kim Doherty (en el centro de la foto de abajo), aeromodelista de Toronto, Canada, viene desarrollando un dispositivo para mover las superficies de control de un modelo de vuelo circular utilizando servos de radio control. Luego lo instaló en un modelo con el cual concurrió en 2012 al Campeonato Mundial F2B desarrollado en Bulgaria.
La configuración básica de este elemento consiste en un conjunto de balancín y su eje, modificados para dar cabida a un soporte de imán y sensor de efecto Hall. A través de la electrónica se mide la desviación angular del sensor desde el punto medio de rotación del campo magnético y se convierte en una señal dirigida a un servo de R/C, para mover las superficies que gobiernan el modelo.
 |
Todos los componentes. El objetivo consiste en hacer girar un conjunto de imanes alrededor de un eje central, dentro del cual hay un sensor de efecto Hall estacionario. |
En un modelo estándar fuerzas tales como la gravedad, la inercia y la fuerza centrípeta tienden a mover las superficies de control cuando no están bajo la tensión de las líneas, de tal forma que el modelo debe estar apuntando constantemente hacia el exterior del círculo a efectos de mantener el control.
En el mecanismo que nos ocupa el balancín no está conectado a ningún push-rod (solo hay un corto push-rod desde el servo hasta la superficie de control), simplemente se mueve sin carga y genera una señal que se traduce en un movimiento del servo y de esa forma mueve la superficie de mando asociada.
 |
Tapas de cojinetes instalados en el eje principal. |
Todo el modelo incluyendo baterías, servos y electrónica sólo pesaba 64 oz.
El creador del sistema declara que, al empuñar la manija, la sensación que se percibe es la misma que en un sistema tradicional. Es posible realizar una regulación muy fina del sistema y con la instalación de servos de acción rápida, la respuesta de los mandos es inmediata. Igual que en un modelo de radio control, las superficies de mando tienen regulación de punto final, recorrido exponencial, mezcla de mandos, etc.
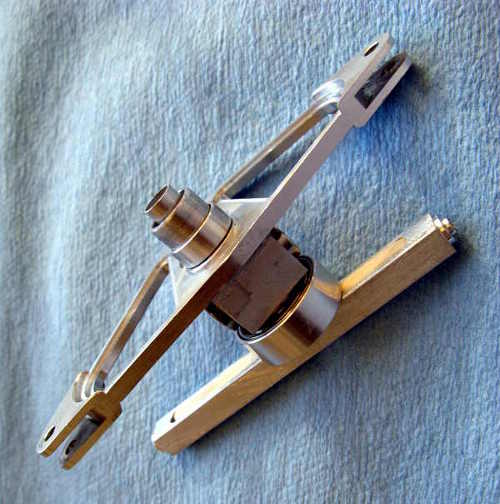 |
Balancín con soporte magnético montado en el eje. |
A través de la tarjeta de programación los parámetros del sistema se pueden ajustar como en cualquier equipo R/C, siendo totalmente reglamentario para la categoría F2B de la FAI, al punto que aprobó la inspección técnica al ser presentado en el Mundial de Bulgaria.
Lamentablemente en ese mismo torneo Doherty rompió el modelo contra el suelo en un vuelo de práctica (no salió del tercer loop), antes de poder hacer su primer vuelo oficial. Cuando lo abrió, ya de vuelta en Canada, en el servo del elevador encontró un engranaje con dos dientes barridos, lo cual demuestra que para esta aplicación se deben utilizar servos con engranajes metálicos.
Pienso que el autor de este desarrollo podría estar considerando su explotación comercial, ya que si bien ha mostrado bastante, no ha expuesto los detalles a fondo de la instalación. El investigador manifiesta su intención de ampliar los estudios para, por ejemplo, comandar también el timón de dirección y seguir refinando el sistema. Por cierto, esta innovación abre las puertas a posibilidades muy interesantes en la acrobacia de precisión.
 |
|
Balancín completamente montado. |
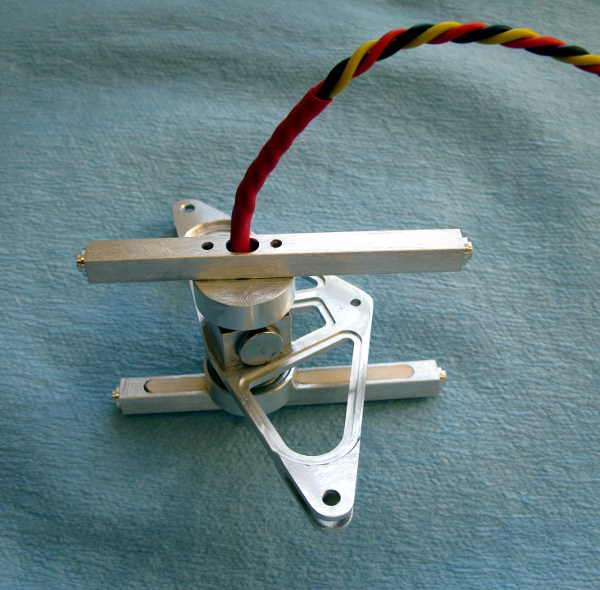
Montaje con sensor de efecto Hall. (el sensor está en el extremo del cable) |
 |
|
Sensor instalado. |
Balancín instalado en la sección central del ala. |
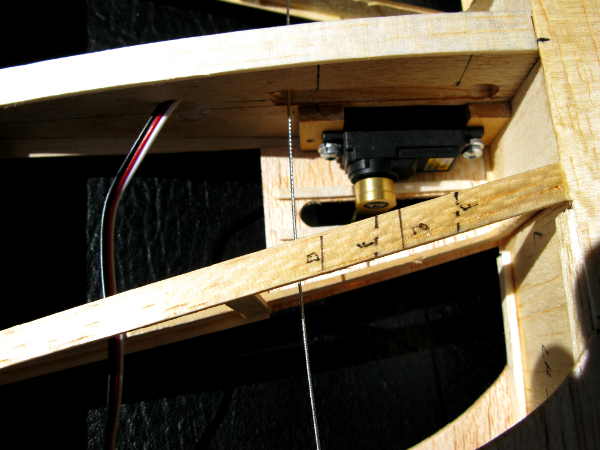 |
Montaje en el ala del servo para el flap (notar el cable de salida). |
|
Juan Carlos Pesce
Buenos Aires


